System overview
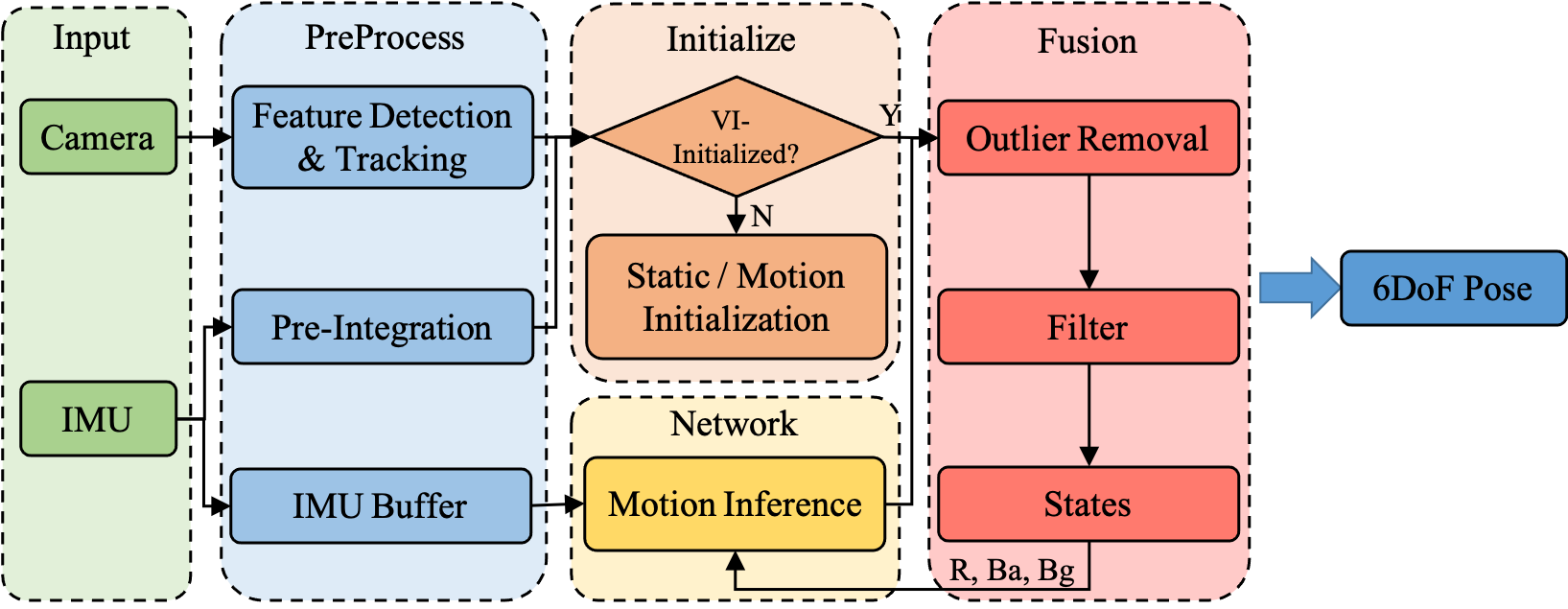
Our estimation system takes IMU data and image as input and is mainly
composed of four modules including preprocessing, initialization,
neural network, and filter.
The IMU data between two consecutive frames are
pre-integrated and sparse features are extracted and tracked from the
images. We also maintain the IMU Buffer as the input of the neural
network.
An initialization phase is necessary to ensure the filter will converge.
In order to adapt to a variety of motion situations, when the
system detects static motion, we use static initialization, and when
the system detects motion, we use motion initialization.
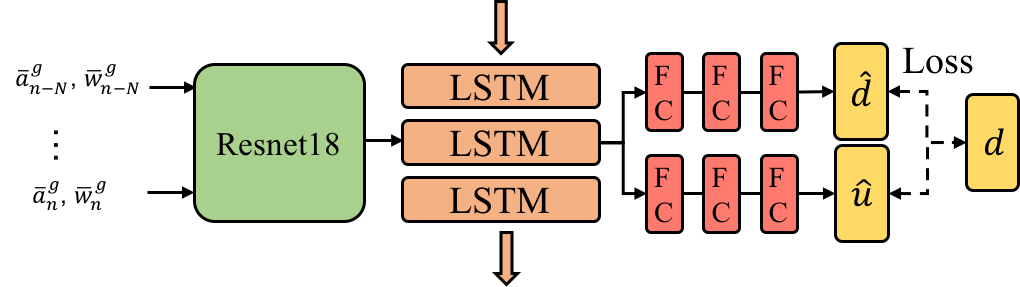
The neural network is trained to learn prior motion distribution.
The network takes a local window of IMU data as input, without
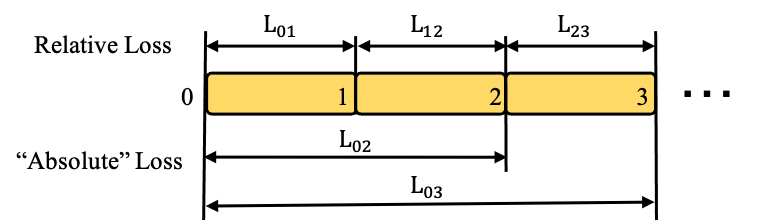
obtaining the initial velocity, and regresses the 3D relative displacement and
uncertainty of this window. Regardless of the influence of
noise, under the same windowed IMU data, different initial velocities
correspond to different motions, which means that motion cannot be
estimated by IMU data alone. Since our system is mainly designed
for handheld AR, AR glasses, and other applications, our estimated
movement is mainly concentrated on human motions. We believe
that despite the broad movement distribution, the human movement
distribution should be relatively narrow, and the same IMU data
corresponding to different motions will rarely appear. Based on this
consideration, we believe that such a network can work normally,
just like the previous related work.
The filter propagates with IMU data and uses sparse features and
network outputs for updates, which tightly couples all measurements.
In our system, the visual constraints can be removed at any time,
and state estimation can also be carried out only based on IMU
measurements.