Pipeline Overview
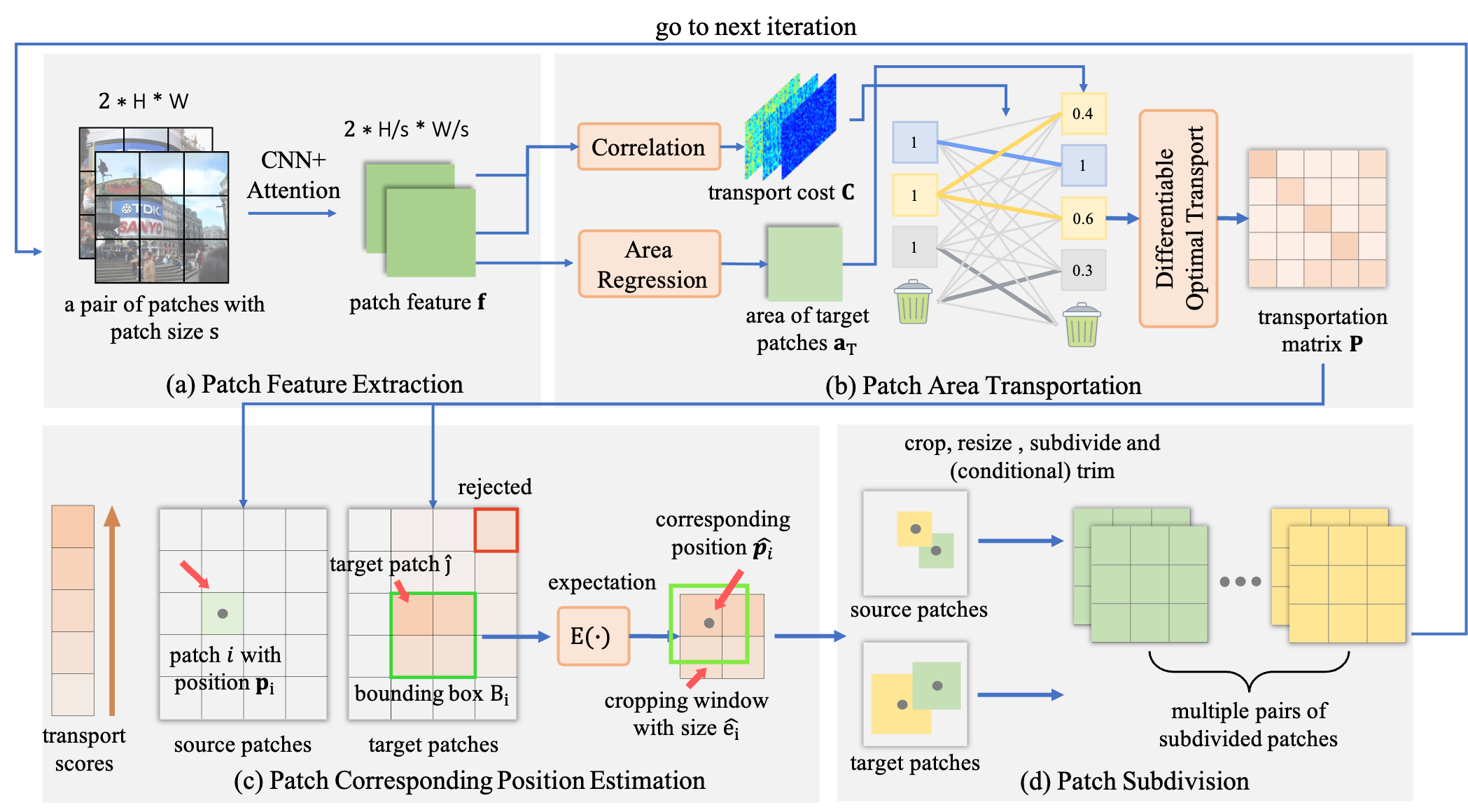
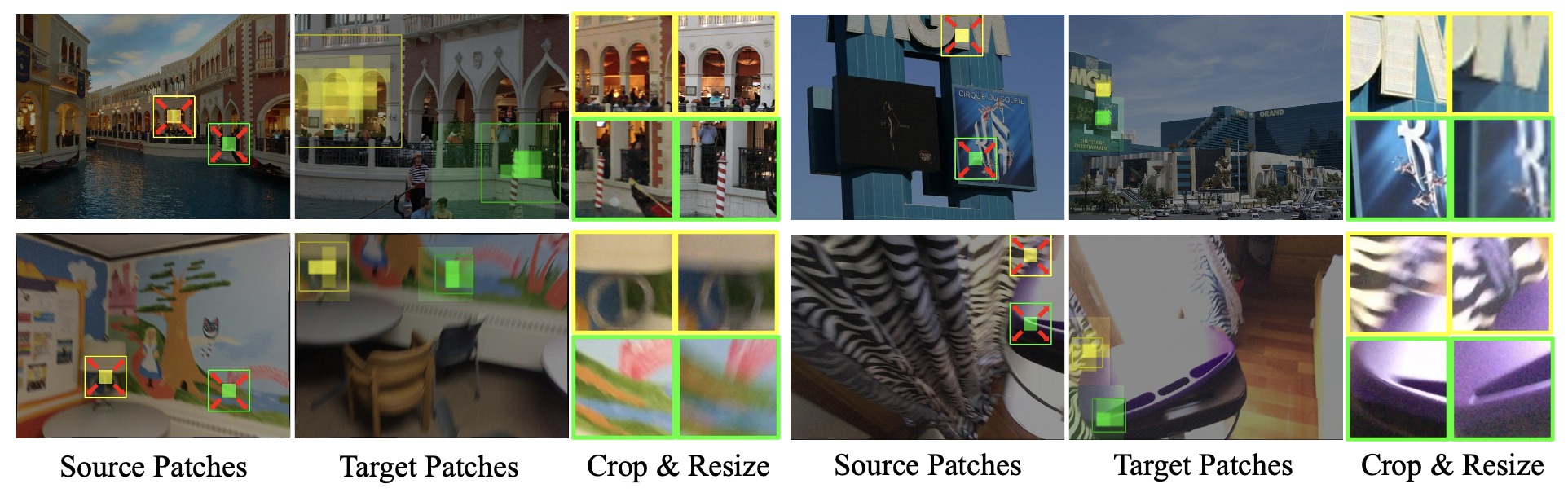
We a) extract features for patches. Then, we b) formulate the patch area transportation by setting source patches' area $\mathbf a_S$ as $\mathbf 1_N$, regressing target patches' area $\mathbf a_T$, and bound the transportation via visual similarities $\mathbf C$. The feature descriptors $\mathbf f$ that produce $\mathbf C$ and the area regression $\mathbf a_T$ are learned by solving this problem differentially. The solution of this problem $\mathbf P$ also reveals many-to-many patch relationships. Based on $\mathbf P$, we c) find corresponding regions, represented by target patches inside a bounding box $B_i$, for each source patch. The exact patch corresponding position $\hat{\mathbf p}_i$ is the position expectation over $B_i$. After cropping and resizing image contents according to the obtained window sizes, which align the contents to the same scale, we d) subdivide the cropped contents to smaller patches and enter the next iteration.