Abstract
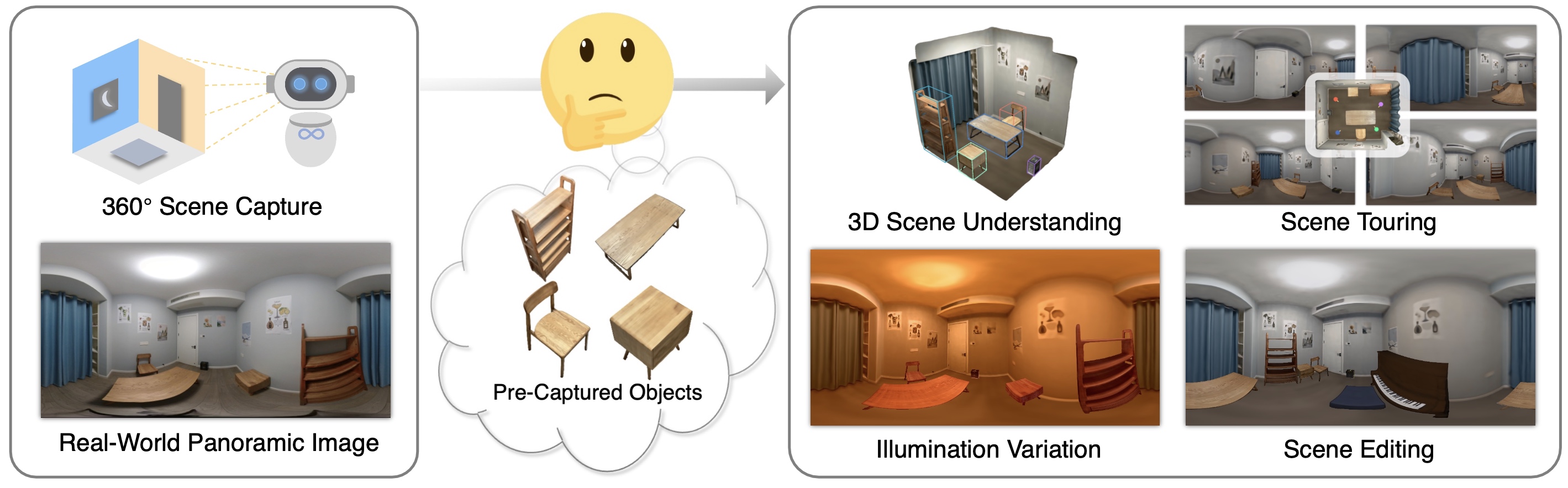
We, as human beings, can understand and picture a familiar scene from arbitrary viewpoints given a single image, whereas this is still a grand challenge for computers. We hereby present a novel solution to mimic such human perception capability based on a new paradigm of amodal 3D scene understanding with neural rendering for a closed scene. Specifically, we first learn the prior knowledge of the objects in a closed scene via an offline stage, which facilitates an online stage to understand the room with unseen furniture arrangement. During the online stage, given a panoramic image of the scene in different layouts, we utilize a holistic neural-rendering-based optimization framework to efficiently estimate the correct 3D scene layout and deliver realistic free-viewpoint rendering. In order to handle the domain gap between the offline and online stage, our method exploits compositional neural rendering techniques for data augmentation in the offline training. The experiments on both synthetic and real datasets demonstrate that our two-stage design achieves robust 3D scene understanding and outperforms competing methods by a large margin, and we also show that our realistic free-viewpoint rendering enables various applications, including scene touring and editing.