


Loading HabitatAgent demo...
Click the corner brackets to open the full stage breakdown.
Habitat-GS supports scalable import of 3DGS assets. These include self-reconstructed GS scenes, public 3DGS datasets (e.g., InteriorGS), and generative pipelines like Marble.

Explore 3DGS scenes in first-person perspective just as a navigation agent do in Habitat-GS!
Your action is restricted on Navigation Mesh, while 3DGS is responsible for photorealistic
rendering.
★ indicates reflective scenes that highlight 3DGS-specific view-dependent effects.
HabitatAgent is an LLM-powered agent system built on top of Habitat-GS, enabling natural-language navigation,
MCP tool integration, and interactive scene exploration via a terminal chat interface.
Click the corner brackets to open the full stage breakdown.
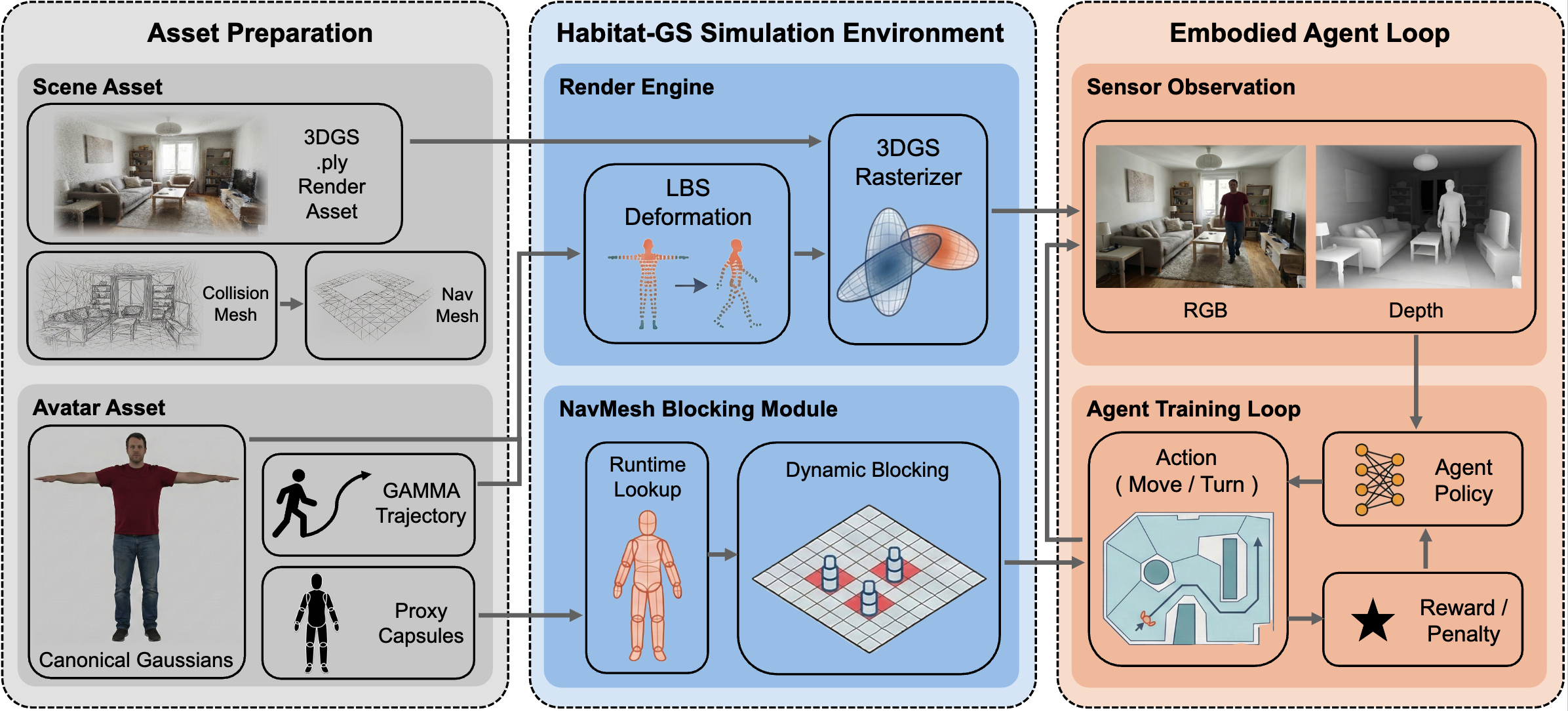
System overview of Habitat-GS. From left to right: Asset Preparation, where 3DGS scene assets and gaussian avatar assets are prepared respectively. Habitat-GS Simulation Environment, where the render engine performs 3DGS rasterization for scene gaussians and LBS deformation followed by rasterization for avatar gaussians, producing RGB-D observations. The NavMesh blocking module retrieves pre-computed proxy capsules at runtime and injects them into the NavMesh for obstacle blocking. Embodied Agent Loop, where the agent policy consumes sensor observations, executes actions, and receives rewards shaped by both navigation success and avatar collision.
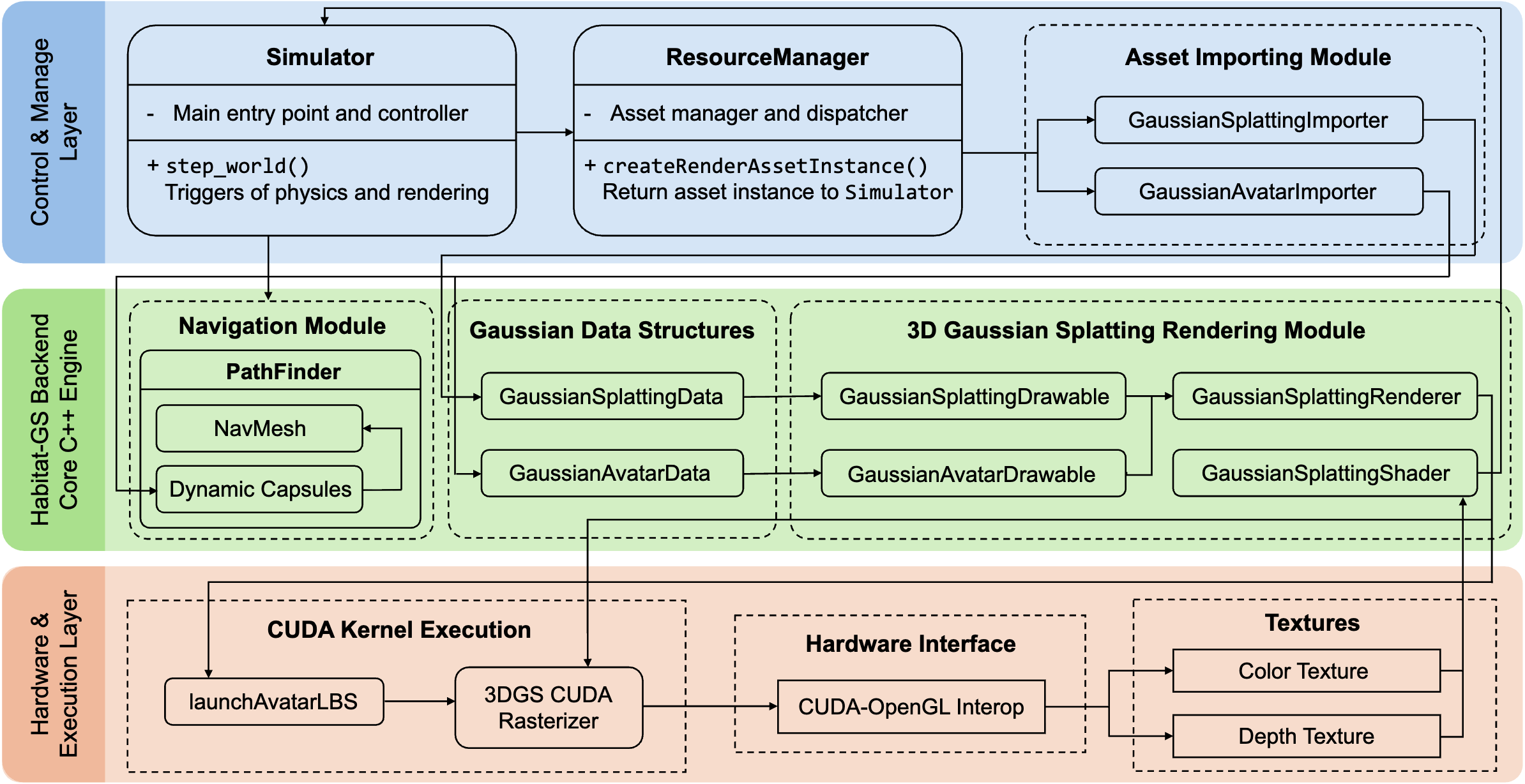
System architecture of Habitat-GS. Habitat-GS is built as a non-intrusive extension to Habitat-Sim. The system adopts a visual-navigation decoupling design principle, separating the visual rendering modules handled by the CUDA-based 3DGS rasterizer and LBS deformation, from the navigation module managed by the traditional NavMesh and injected proxy capsules. This allows for photorealistic agent observations without modifying the core Habitat-Sim navigation logic. For more details, please refer to our paper.
@misc{xia2026habitatgs,
title={Habitat-GS: A High-Fidelity Navigation Simulator with Dynamic Gaussian Splatting},
author={Ziyuan Xia and Jingyi Xu and Chong Cui and Yuanhong Yu and Jiazhao Zhang and Qingsong Yan and Tao Ni and Junbo Chen and Xiaowei Zhou and Hujun Bao and Ruizhen Hu and Sida Peng},
year={2026},
eprint={2604.12626},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.12626},
}