Method
Pipeline of InfiniDepth:
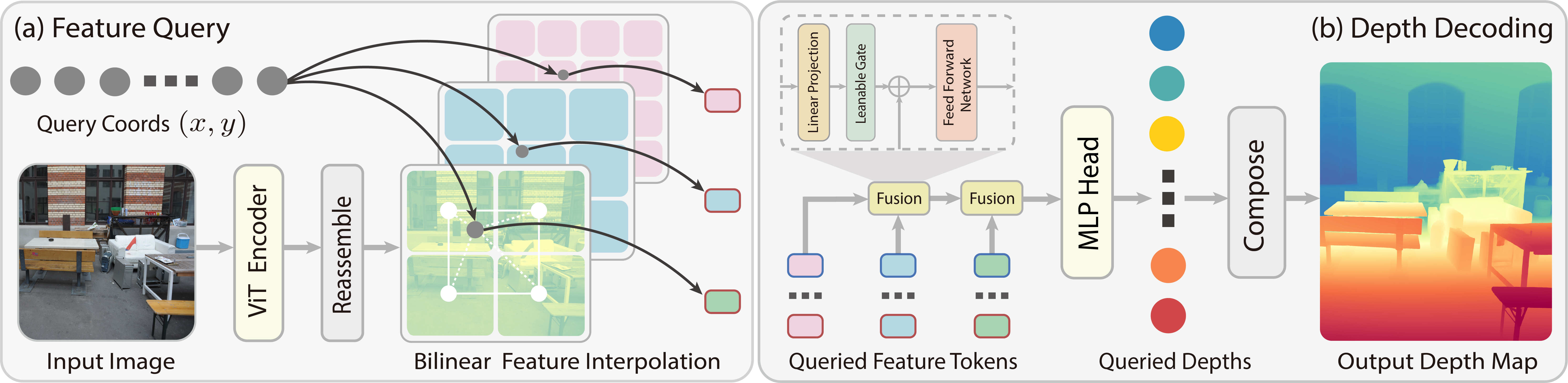
- Feature Query: given an input image and a continuous query 2D coordinate, we extract feature tokens from multiple layers of the ViT encoder, and query local features for the coordinate at each scale through bilinear interpolation.
- Depth Decoding: given the multi-scale local features queried at the continuous coordinate, we hierarchically fuse features from high spatial resolution to low spatial resolution, and decode the fused feature to the depth value through a MLP head.
